Fuzzy Logic Research
Fuzzy Speech Recognition
Masters Thesis

Abstract
Speech recognition allows for extremely efficient man-machine communication. Since most computers are used to interactively input or output data, communication by speech represents the ideal computer interface. Recognition requires intelligence, and is, therefore, a much more difficult problem than speech production. While general speech recognition is a daunting task, a much simpler system would still be useful. This thesis presents a simple speech recognition system that can be implemented with a personal computer and a sound card. Once a limited system has been implemented, its capabilities can be scaled by using faster computers and specialized hardware as necessary.
Fuzzy logic allows effective decision making in the presence of uncertainty. Identifying spoken words, even in an ideal environment by a trained speaker, is a complex task filled with uncertainty. The speech waveform is nonlinear and variant, removing the possibility of simple analysis. However, by analyzing the waveform for reoccurring and semi-stable features, small segments may be classified. A fuzzy expert may then make decisions based on these features to identify the spoken word. The identification represents the decision that the chosen word is present and also that other words are not present. Furthermore, the system's confidence in its identification can be used to accept the identification or to request further information or help.
 This thesis is available as a PDF file (622K).
This thesis is available as a PDF file (622K).
Fuzzy Logic Enhanced Symmetric Dynamic Programming for Speech Recognition
5th IEEE International Conference on Fuzzy Systems

Abstract
Fuzzy logic allows effective decision making in the presence of uncertainty. Identifying spoken words, even in an ideal environment by a trained speaker, is a complex task filled with uncertainty. The speech waveform is nonlinear and variant, removing the possibility of simple analysis. Dynamic programming is a time normalization technique that allows static templates to be used to identify spoken words. Fuzzy logic enhancements enable the technique to handle noise and quantization errors better and improves classification accuracy. An important consequence of using a fuzzy based system is that the system's confidence in its identification can be used to accept the identification or to request further information.
View the Paper as HTML.
5th IEEE International Conference on Fuzzy Systems
Abstract
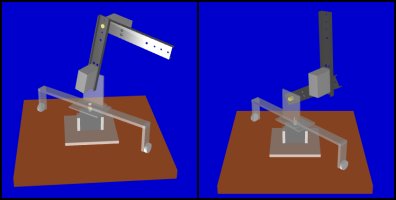
Articulated robot arms offer maximum positioning flexibility but suffer from complex kinematics. In most applications, linear motion is desirable. Calculating the kinematic equations which govern an articulated arm is straight forward; however, it is generally difficult to calculate the inverse kinematic equations that are needed to position the arm in closed form. Using a fuzzy reasoning system, it is possible to accurately position an articulated arm without explicitly solving the inverse kinematic equations.
In 2003, the interface we re-written to support a multi-threaded 3D GUI using DirectX with lighting and transparency effects. The on-screen simulation includes friction and acceleration models allowing it to exactly mimic the actual device motion. In fact, demonstrations were made where the arm was controlled at a distance using just the screen interface. The new control system allows control of the arm using a joystick over any communications link allowing real-time control of the arm from physically separate locations.
This paper is available as a PDF file (557K).
Return to Main Page
Contact me at: pmills@ieee.org - © 1995 - 2024 Patrick M. Mills. All Rights Reserved.