Robotics Research
Autonomous UAV
Research Funded by: USAF Office of Scientific Research
Abstract
This research deals with creating a series of unmanned aerial vehicals (UAV) that can intelligently follow each other in the air without direct radio communications.
The control system is based on an embedded system board with a microprocessor running the Linux operating system. A multi-threaded soft real-time environment allows control of GPS (uBlox), Inertial Guidance (Crista), and a ground communications link for testing purposes (microHard). The entire system resides in a radio controlled (R/C) airplane and is totally autonomous.
Integration between the microprocessor and R/C units allows human control of the aircraft in emergencies. An on-screen control panel allows viewing of real-time data from the system as well as flight control via a linked controller.

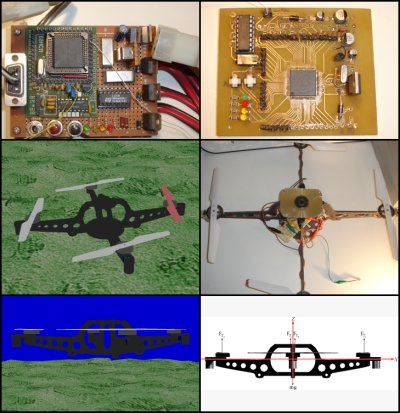
Fuzzy Logic Control of a Four Rotor Autonomous Aerial Platform
Proceedings of the 2001 International Conference on Computational Intelligence for Modeling, Control and Automation
Abstract
The Four Rotor Autonomous Aerial Platform (FRAP) is a novel aerial platform utilizing fuzzy logic control with evolutionary tuning. Research started in 2000 and a general paper describing the platform was published in 2001. In 2003, the electronics were redesigned to take advantage of advances in MEMS sensors and incorporate a faster microprocessor with built-in fuzzy logic processing.
 This paper is available as a PDF file (182K).
This paper is available as a PDF file (182K).
The 2003 update is available as a PDF file (417K).
5th IEEE International Conference on Fuzzy Systems
Abstract
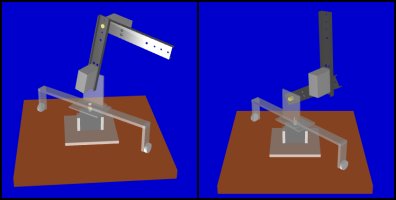
Articulated robot arms offer maximum positioning flexibility but suffer from complex kinematics. In most applications, linear motion is desirable. Calculating the kinematic equations which govern an articulated arm is straight forward; however, it is generally difficult to calculate the inverse kinematic equations that are needed to position the arm in closed form. Using a fuzzy reasoning system, it is possible to accurately position an articulated arm without explicitly solving the inverse kinematic equations.
In 2003, the interface we re-written to support a multi-threaded 3D GUI using DirectX with lighting and transparency effects. The on-screen simulation includes friction and acceleration models allowing it to exactly mimic the actual device motion. In fact, demonstrations were made where the arm was controlled at a distance using just the screen interface. The new control system allows control of the arm using a joystick over any communications link allowing real-time control of the arm from physically separate locations.
This paper is available as a PDF file (557K).
MuLIR
Senior Engineering Project
Abstract
MuLIR (Multi-legged Interactive Robot) is a six-legged mobile robot platform. The platform utilizes five microprocessors working in a SIMD configuration to control the legs, process visual, auditory, and tactile sensory inputs, and plan actions.

View the MuLIR Project.
Return to Main Page
Contact me at: pmills@ieee.org - © 1995 - 2024 Patrick M. Mills. All Rights Reserved.